题目:空间轮廓数据的轮廓内监控
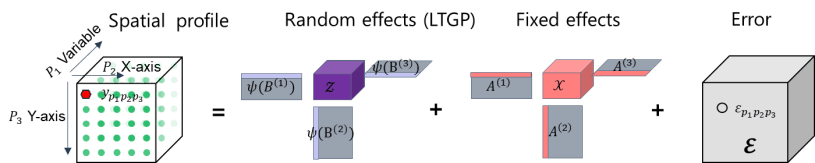
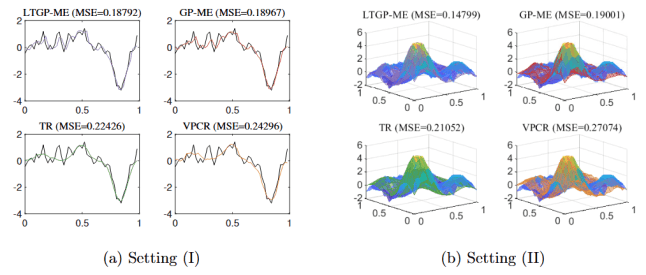
先进的传感技术实现了在二维或更高维坐标系中的实时数据采集,可获得空间轮廓数据(spatial profiles)。这类数据在制造领域得到了广泛应用,有助于异常检测与质量控制。然而,大多数现有的监控方法在应用时需要完整的轮廓数据,从而导致检测延迟。考虑到数据的空间相关性和序贯特性,高斯过程(GP)建模提供了一种可行的解决方案。然而,密集采样的空间轮廓通常伴随超高维的协方差矩阵,给估计精度带来了挑战。此外,现有方法常将空间位置作为GP的预测变量,忽略了空间轮廓生成过程中隐含的诸多潜在因子。